1. Технические характеристикидвигатель eVTOL
In распределенная электроэнергияДвигательная установка, двигатели приводят в движение множество пропеллеров или вентиляторов на крыльях или фюзеляже, образуя двигательную систему, которая обеспечивает тягу летательному аппарату. Плотность мощности двигателя напрямую влияет на грузоподъемность летательного аппарата. Выходная мощность, надежность и адаптивность двигателя к окружающей среде являются важными факторами, определяющими динамические характеристики и безопасность летательного аппарата с электрическим двигателем. Выбор электромобилей, дронов и двигателей eVTOL различается в зависимости от стоимости, сценариев применения и других причин [1].

(Источник фото: официальный сайт Network/Safran)
1) Электромобили: более постоянный магнитсинхронные двигатели,Электродвигатели с постоянными магнитами, обладающие более высокой эффективностью и крутящим моментом, могут обеспечить лучшие ходовые качества. В то же время, высокая удельная мощность таких двигателей позволяет электромобилям достигать большей мощности при тех же габаритах.
(2) БПЛА: обычно используется бесщеточный двигательДвигатель постоянного тока.Бесщеточный двигатель постоянного тока имеет малый вес и низкий уровень шума, а также низкие затраты на техническое обслуживание, что подходит для требований к полетам БПЛА; во-вторых, скорость вращения бесщеточного двигателя постоянного тока выше, что подходит для высокоскоростных полетов дронов. Например, компания DJI использует бесщеточные двигатели.
(3) eVTOL: Более высокие требования к эффективности двигателя и плотности крутящего момента, синхронный двигатель с постоянными магнитами является очень перспективным решением для системы электропривода, поскольку двигатель с осевым потоком и постоянными магнитами имеет высокую степень использования радиального пространства, а плотность мощности и плотность крутящего момента имеют преимущества при малом соотношении длины и диаметра. В современных электрических летательных аппаратах вертикального взлета и посадки, таких как Joby S4 и Archer Midnight, используются синхронные двигатели с постоянными магнитами [1].
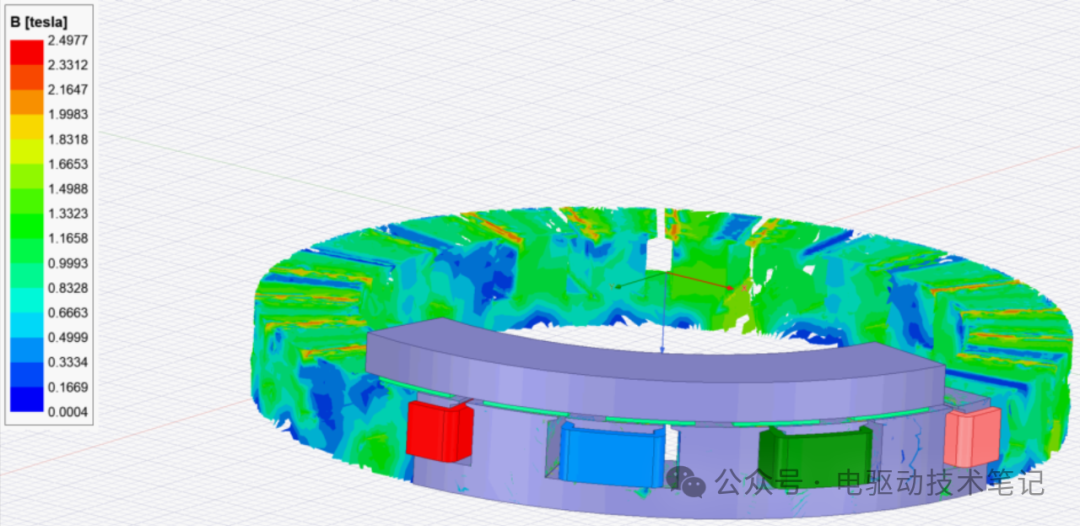
На следующем рисунке показано облачное изображение интенсивности магнитной индукции неподвижного ротора однороторного осевого двигателя с одним статором.
На следующем рисунке представлено сравнение параметров электродвигателей самолета и электромобиля.

2. Тенденции развития двигателей eVTOL
В настоящее время основной тенденцией развития силовых установок eVTOL является снижение веса конструкции двигателя и вспомогательного веса системы охлаждения за счет совершенствования электромагнитной конструкции, технологии терморегулирования и технологии облегчения конструкции, а также постоянного повышения удельной мощности двигателя и выходной мощности в широком диапазоне изменяющихся условий. Согласно «Исследованиям и разработкам летающих автомобилей и ключевых технологий», в авиационном двигательном комплексе удалось достичь номинальной удельной мощности более 5 кВт/кг за счет использования изоляционных материалов с более высокими температурными пределами, материалов постоянных магнитов с более высокой плотностью магнитной энергии и более легких конструкционных материалов. Благодаря усовершенствованию электромагнитной конструкции двигателя, например, использованию магнитной решетки Хальбаха, конструкции без железного сердечника, обмотки из литцевой проволоки и других технологий, а также улучшению конструкции системы теплоотвода, ожидается, что номинальная удельная мощность двигателя достигнет 10 кВт/кг к 2030 году, а к 2035 году превысит 13 кВт/кг [1].

3. Сравнение чисто электрических и гибридных маршрутов
По сравнению с чисто электрическим и гибридным вариантами, среди нынешних производителей отечественный проект eVTOL в основном основан на чисто электрической схеме, ограниченной плотностью энергии литий-ионных батарей, а eVTOL с малой пассажировместимостью является наилучшим вариантом для применения чисто электрической двигательной установки. За рубежом некоторые производители заранее разработали гибридную схему и лидируют в многочисленных раундах испытаний и итераций. Как видно из приведенной ниже таблицы, гибридная схема явно превосходит по показателю продолжительности полета и в будущем может найти большее применение в сценариях полетов на средние и дальние расстояния и на малых высотах [1].
Дата публикации: 27 февраля 2025 г.